尹杰团队目前致力于机械超材料 软体机器人 以及多功能界面材料的研究
来源:知社学术圈
5月9日消息,北卡州立大学(NCSU)尹杰教授团队和科罗拉多州立大学(CSU)赵建国教授以及纽约市立大学(CCNY)苏浩教授团队合作,通过巧妙利用双稳态间的快速跳转(snap-through bistability),实现了可以像猎豹一样奔腾的快速奔跑软机器人。身长约7厘米重量约50克,其速度可达每秒2.7个身长(187.5mm/s)。同时该双稳态机制有多方面用途,既可以实现水下软机器人的快速游动,速度可达每秒0.8个身长(117mm/s);又可以用于可调节抓力的软机器人抓手(可抓取易碎的生鸡蛋也可提起重达10公斤的哑铃)。
软机器人通常由比人体肌肉还要柔软的软材料制造而成 ,通过控制其柔软身体的变形来模仿自然界中各种软体动物的运动,比如毛毛虫,蛇、鱼以及水母等。和刚性机器人相比,软机器人在柔性、灵活性、以及安全性等方面都具有优势。但是同时,柔性材料也带来了一些天然缺陷,比如响应慢及力量小等,因此大多数软机器人运动速度较为缓慢,介于每秒0.02至0.8个身长(自身身体长度)。自然界中蜗牛的爬行速度为每秒0.1-0.2个身长,而猎豹的速度为每秒16个身长。如何让软机器人也能高速跑起来成为了一个亟待解决的问题。
快速奔跑软机器人可通过巧妙利用双稳态间实现快速跳转
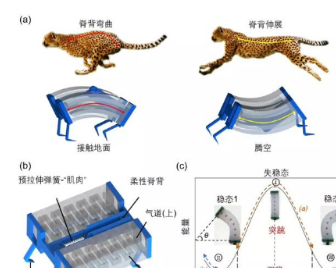
猎豹的脊背柔软且富有弹性,通过拉伸背部肌肉来控制脊背的快速弯曲以及伸长,来实现高速奔跑(图1a)。受此启发,研究团队设计了柔性脊背软机器人(图1b),脊背的变形由软“身体”-气动软驱动器-来驱动。该驱动器有上下两层气道,在充气加压后可以双向弯曲,从而带动脊背的上下弯曲变形。为了实现脊背的快速运动,研究团队给脊背装上了“肌肉”-预拉伸弹簧(图1b)-来存储能量,使其变身成为一个双稳态机构(图1c):背部向上弯或向下弯代表两种稳定状态;背部变直时,为失稳状态。当来回摆动“身体”时,“肌肉”中的能量得以储存和快速释放,柔性脊背在双稳态间来回突跳,从而实现类似猎豹脊背的快速运动。团队将此机器人命名为LEAP高性能软机器人。
快速水下软机器人:当给软驱动器身后加装一个柔性尾巴,通过左右摆动身体,可以模拟鱼的游动(图3a-3b)。以往研究表明,驱动频率越高,软机器人游动速度越快,在5Hz的驱动频率下,最快速度可达0.7身长/秒(图3c)。该研究显示即使在低频驱动下(比如约1.3Hz),双稳态间的快速突跳使其速度也可高达每秒0.78个身长(图3c)。
变刚度机器人抓手:通过实时调节弹簧中的拉力,机械手的刚度也可以随之改变。基于此,该团队展示了可以实时改变抓力的机械手。机械手既可以抓取易碎的鸡蛋,又可以抓取不规则形状线圈,矿泉水,以及直接抓取哑铃等(图3d)。
该工作利用失稳原理来加快软材料的响应,理论上该原理也可以推广到其它双稳态以及多稳态软机构,以及更小尺度和活性材料驱动器比如液晶弹性体,水凝胶,形状记忆聚合物和电介质弹性体等。驱动原理将不限于气压或水压,可推广至相应的外部刺激比如温度、pH、光、电场以及磁场等自主软机器人。
团队简介
该工作由北卡州立大学尹杰团队主导,与科罗拉多州立大学(CSU)赵建国教授、纽约市立大学(CCNY)苏浩教授以及天普大学(Temple)Andrew Spence教授团队合作完成。通讯作者为尹杰教授。该工作第一作者是尹杰团队的唐一超博士,其它作者有尹杰团队博士生赤银鼎,科罗拉多州立大学Sun Jiefeng,纽约市立大学Huang Tzu-Hao和天普大学Maghsoudi Omid。
尹杰团队目前致力于机械超材料,软体机器人,以及多功能界面材料的研究。