hirarattananon教授受到启发 设计了一种可变形的防碰撞四旋翼无人机
来源:电子发烧网
最近几年,很多朋友已经不满足于手机自拍,开始迷上用四旋翼无人机航拍的感觉。但是在天气不好的时候,无人机往往难以控制,撞到墙壁就再正常不过了。旋翼断了,维修就是一个费钱又糟心的事情。
为了解决四旋翼无人机失控以后撞墙的问题,香港城市大学的Pakpong Chirarattananon教授受到传统折纸的启发,设计了一种可变形的防碰撞四旋翼无人机。该四旋翼无人机在碰撞触发时可折叠刚性机身以保护中央部件,从而保护脆弱的重要零部件免受随后掉落到地面的冲击。网友纷纷表示,就像一个含羞草一样,居然还能自己自动闭合,太神奇了。
这种新型四旋翼无人机在飞行过程中碰撞到墙壁等障碍物的时候,可以像折纸一样按照预定的特征自动进行折叠变形,不需要额外的传感器或者执行器。同时,所有的可折叠四个旋翼均为刚性体,且在飞行状态和折叠状态之间转换的互锁机构也是纯机械的。
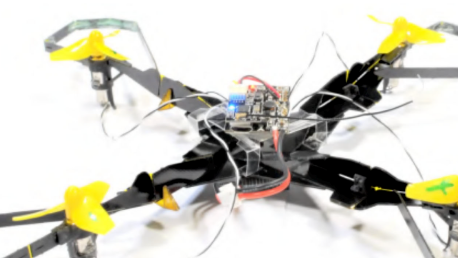
图2受折纸启发的四旋翼无人机三个主要部件(可折叠旋翼,折叠耦合器和折叠触发器),折叠角度限制,和折叠以后的无人机形态
在一个固定平台上对可折叠旋翼的折叠性能进行试验验证,采用240Hz摄像机对折叠过程录像。试验结果表明,所有的旋翼开始折叠的时间仅有细微的差别,整个折叠收缩的过程大约仅为0.2秒。在证明碰撞折叠的可行性的同时,也证明了折叠耦合器的必要性。
四旋翼无人机的机身在整个折叠过程中起到很重要的作用。为了保证机身机构的刚性,同时尽可能的限制旋翼的厚度(厚度越厚刚性越好),研发人员在旋翼中加入折纸艺术中的折痕设计。在发生碰撞的时候,冲击能量会直接被可折叠的旋翼吸收,并暂时存储在机械结构中。为此,可折叠设计完全依赖于刚性结构和挠性铰链,从而无需使用弹性组件吸收碰撞的能量,有效简化了制造和建模工作。
为了保证所有旋翼在碰撞发生瞬间同时折叠,研发人员在机身上安装折叠耦合器,并连接四个旋翼。在理想情况下,整个机身的折叠自由度只有一个,并且所有旋翼可以同步折叠。同时安装了一个折叠触发器,保证四旋翼无人机在碰撞时能够自动启动折叠机制,完成从飞行状态到折叠状态的过度。
研发人员设计的四旋翼无人机搭载了电池、内部电子设备以及飞行控制器,从而保证无人机能够实现稳定飞行。为了验证在飞行过程中碰撞墙壁时的折叠能力,研发人员操纵四旋翼无人机以大约1.5m/s的速度在一定高度的水平面上飞行,垂直撞向预设的墙壁。实验结果显示,在高速碰撞之后的0.2秒以内,四旋翼无人机机身实现折叠,随后落地,并且内部脆弱的零部件均完好无损。
实验证明,任意一个旋翼受到外界碰撞的时候四个旋翼能够自动同步折叠。可折叠设计充分保障了四旋翼无人机在撞到障碍物的时候吸收碰撞瞬间产生的能量,从而保证即使从空中掉落也能够保护自身脆弱的重要零部件。
作者简介
PakpongChirarattananon博士,目前担任香港城市大学助理教授,获得英国剑桥大学的学士和硕士学位,随后师从哈佛大学Robert Wood教授,于2014年获得哈佛大学博士学位。他的研究工作集中在昆虫级别的有翼机器人的动力学系统及其控制上。自2014年12月起,他加入了香港城市大学机械与生物医学工程系,并成立了机器人与智能系统实验室。
Chirarattananon博士对应用控制和动态系统理论来研究仿生飞行机器人系统非常感兴趣。他在Science上发表了两篇论文,并被国际公认的机器人大会提名为多个奖项的决赛入围者。