跳跃和翼拍微型机器人的新设计
加利福尼亚大学伯克利分校的研究人员最近设计了两种昆虫级微型飞行器,一种是跳跃式的,另一种是人工翅膀。这些机器人设计在arXiv上发表的两篇 论文中提出,模仿昆虫中观察到的真实生物行为。这两种微生物,被称为果蝇机器人和跳跃μbot,由博士开发。学生Palak Bhushan作为他的论文的一部分,在他的教授Claire Tomlin的监督下。
在未来,微型机器人可以有许多重要的应用,协助人类完成遥感,在自然灾害后搜寻幸存者和太空探索等任务。实际上,微型计算机具有几个有利的特征,包括它们的小尺寸,昆虫般的机动性以及在具有挑战性的地形中更容易导航。
“坚韧的地形通常会增加机器人与环境的相互作用,”Bhushan和Tomlin告诉TechXplore。“飞行器和跳线器(例如苍蝇,蚱蜢等)通过飞越/跳过障碍物并到达下一个目的地来减少这种相互作用,与必须在每个小凹凸上行走的蚂蚁相反。飞行器与地球和其他物体更相关行星具有密集的大气层,而对于没有大气层和重力较低的地方,跳线更为相关。“
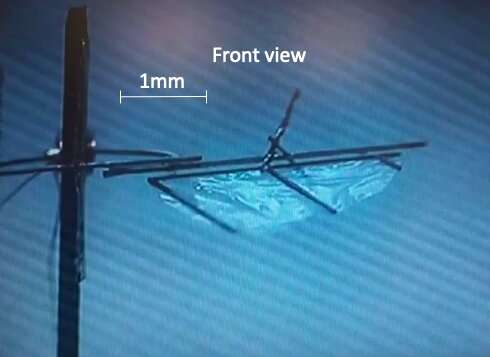
由研究人员开发的第一个机器人,他们称之为果蝇机器人,是有史以来第一个有效模仿昆虫机翼运动学的亚毫克机翼飞行器。到目前为止,大多数小扑翼微型机都是100毫克质量规模。然而,在自然界中,微小的飞行昆虫(例如果蝇)的质量规模为1毫克,有些甚至更小。
研究人员解释说:“这种特殊微型开发的发展背后的动机是弥合已经制造的和可能的微小差距。” “我们的主要目标是使用车载电机和机构展示这种尺寸规模的扑翼运动,但需要外部电源。”
小飞虫通常通过执行大的翼行程来产生升力。Bhushan和Tomlin在开发这种机器人时面临的主要挑战之一是制造小型执行器,而不是能够产生足够大的旋转来驱动人造机翼。
“先前的工作使用小型旋转电机,然后使用放大机制将这种运动放大到大转动,”Bhushan和Tomlin解释说。“这些放大机制的特征尺寸可以降至70um,即使对于100毫克规模的机器人也是如此。简单地将设计缩小100倍将导致更小的电机运动,这反过来又要求放大机制中更小的特征尺寸。是不可行的。“
为了解决与缩小微型设计相关的问题,研究人员创造了一种大型旋转马达,不需要任何放大机制即可工作。他们通过开发一种扭转弹簧来实现这一点,在扭转弹簧中,单个悬臂的小旋转加起来在共振驱动时产生大的旋转。
通过研究人员的设计,飞行机器人的特征尺寸可以降至100um,即使是1 mg规模。值得注意的是,他们的果蝇机器人可以在相对较短的时间内制造。此外,其低工作电压(即70mV)应该使其在未来易于测试和部署。
研究人员开发的第二种微型探测器是一种尺寸为17mm x 6mm x 14mm,重量为75毫克的跳跃式机器人。这种机器人的系留版本每分钟可以跳6次,完美地落在它的脚上。为了向上跳8毫米高,机器人消耗大约6.4毫瓦的功率。
就像果蝇机器人一样,这种微型机器人是其中最小的机器人,至少就研究人员而言。事实上,在过去的研究中报告的最小的跳跃机器人带有一个重约300毫克的机载电源,在其化学电源耗尽之前只能跳一次。
研究人员表示,“我们的目标是开发出能够进行可重复跳跃的低于100毫克质量的物质。” “请注意,由于我们与果蝇机器人相比规模要大得多,我们可以更加雄心勃勃,因此也有一个机载电源。”
小跳跃的昆虫通常在跳跃时用腿快速地推动地面。这种瞬时功率需求太高而无法使用车载电机进行再现。为了克服这一挑战,先前的研究已经使用马达将能量存储在机载机构中,然后快速释放这种能量,这允许机器人执行跳跃。在他们的研究中,研究人员还决定使用这种方法。
“电机很重,很难在小规模上制造,需要特殊的控制信号来操作它们,”Bhushan和Tomlin说。“为了简化制造和控制,我们确保我们的设计能够使用单个电机进行操作,使其他所需功能被动地发生,而且我们设计电机使用简单的ON / OFF控制信号来运行。”
在Bhushan和Tomlin开发的跳跃机器人中,单个电机通过累积小的旋转产生连续的旋转运动。然后,该运动用于缠绕设计用于在能量存储机构中拉动弹簧的弦。在能量达到特定阈值后,该机制迅速释放机器人储存的能量,最终使其能够跳跃。
“我们电机的简单控制要求允许我们使用1毫克光伏电池为其供电,当红外激光照射在它们上时产生电流 - 但这种电源只是未来微电池可用时的占位符,”研究人员说。
大多数现有的100毫克级机器人使用压电和静电执行器,需要200-5000V的高电压才能运行。这意味着它们经常与用于驱动它们的沉重且低效的电压放大电路斗争。根据研究人员的说法,这是迄今为止很少有成功制造无系绳微型机的主要原因。
“我们成功设计了新型电磁执行器,这是一种磁铁加线圈系统,就像你的耳机一样,需要低电压才能操作 - 果蝇机器人只需0.07V,跳跃机器人只需0.8V,”Bhushan和汤姆林说。“因此,当我们将来拥有好的微电池时(我们现在还没有),我们的机器人将会更轻,功耗更低。”
为了有效地操作,所有1毫克规模的机器人以及几个100毫克规模的机器人需要特殊的“受控”环境,例如以外部磁场变化,热板或振动板为特征。另一方面,这种果蝇机器人和跳跃机器人使用的执行器都在机上,因此这些小型机器人在常规环境中也表现良好。
令人印象深刻的是,研究人员能够制造出迄今为止报道的最小翼展装置,其质量与果蝇相同。他们还成功设计了迄今为止开发的最轻的无绳跳跃机器人。
目前,电池仍然无法支持100毫克规模的飞行机器人,因此研究人员可能需要一些时间才能成功为1毫克规模的飞行机器人供电。此外,机器人的电机效率为0.7%,而果蝇的肌肉效率为17%。
在他们未来的工作中,研究人员计划专注于开发更高效的电机,进一步完善他们的设计,并为最终发布小到足以支持他们的机器人的电池做好准备。他们还想制造低功率低于0.1毫克的传感器和控制器,因为这样可以使他们的果蝇机器人自主。
“至于跳跃机器人,我们计划在发射速度上添加一个水平分量,这可以帮助机器人在周围导航,”Bhushan和Tomlin解释道。“考虑到这种机器人的低功率要求以及与果蝇机器人相比更大的尺寸,我们还应该能够添加现有的电池以使其完全自给自足的跳跃。”